Une pince de robot pour manipuler des objets fragiles, lourds et de formes irrégulières
Le préhenseur en forme d'étoile conçu à l’Institut universitaire des systèmes thermiques industriels peut saisir des petits objets fragiles et de formes complexes (œuf, fraise, plante...), mais aussi des objets plus volumineux et pesant plusieurs kilos. Ces résultats sont publiés dans Advanced Intelligent Systems.
Les pinces de robot en matériau rigide ne sont pas conçues pour saisir des objets fragiles ou de formes complexes. Des préhenseurs souples, par exemple à base d'élastomères, sont mieux adaptés. Mais ils ne conviennent pas à la manipulation d'objet lourds et volumineux. Publiée dans Advanced Intelligent Systems, la solution proposée par une équipe de l’Institut universitaire des systèmes thermiques industriels (IUSTI, CNRS/Aix Marseille Université) - une ''pince'' en forme d'étoile qui se contracte pour saisir l'objet placé en son centre - répond à tous ces cas de figure.
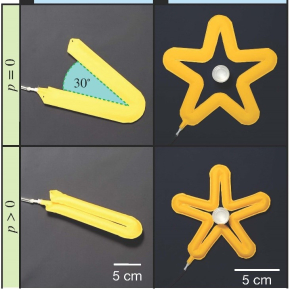
L'élément clé du dispositif est un tube de textile en forme de V, qui se referme lorsqu'on le gonfle. Ce phénomène contre-intuitif est dû au caractère inextensible du textile utilisé (le nylon, dans le prototype du laboratoire). Les chercheurs ont alors assemblé dix de ces coudes avec des tubes du même textile, pour former une étoile à cinq branches qui se contracte quand on la gonfle et exerce une force sur l'objet placé en son centre. L'étude numérique et expérimentale du système a permis de modéliser et de prédire le comportement de l'actionneur en V, puis la force exercée par l'étoile sur un objet en fonction de la pression de gonflage. L'étoile à cinq branches est la géométrie qui donne une contraction radiale maximale. En empilant des étoiles dans un cadre rigide, il est possible d'augmenter la force exercée, et de saisir des objets de plus grandes dimensions. Enfin, un film d'élastomère déposé sur les coudes internes de l'étoile augmente la friction entre le préhenseur et l'objet, ce qui facilite sa saisie.
Pour illustrer la polyvalence de la nouvelle pince souple, les chercheurs ont montré qu'elle pouvait manipuler des objets fragiles ou de formes complexes (une fraise, un régime de bananes, une plante verte...), mais aussi bien, en empilant trois étoiles, une boule de pétanque ou une bouteille de champagne ! L'utilisation n'est limitée que par la pression maximale que peut supporter l'étoile en textile sans se détériorer. La pince en étoile étant très légère et facile à fabriquer, rien n'interdit de concevoir des systèmes de plus grandes tailles. Un autre prototype a ainsi permis de manipuler un ballon de basket. Les chercheurs veulent également étudier d'autres types de structures gonflables susceptibles d'exercer une force radiale non plus seulement dans le plan, mais hors du plan.
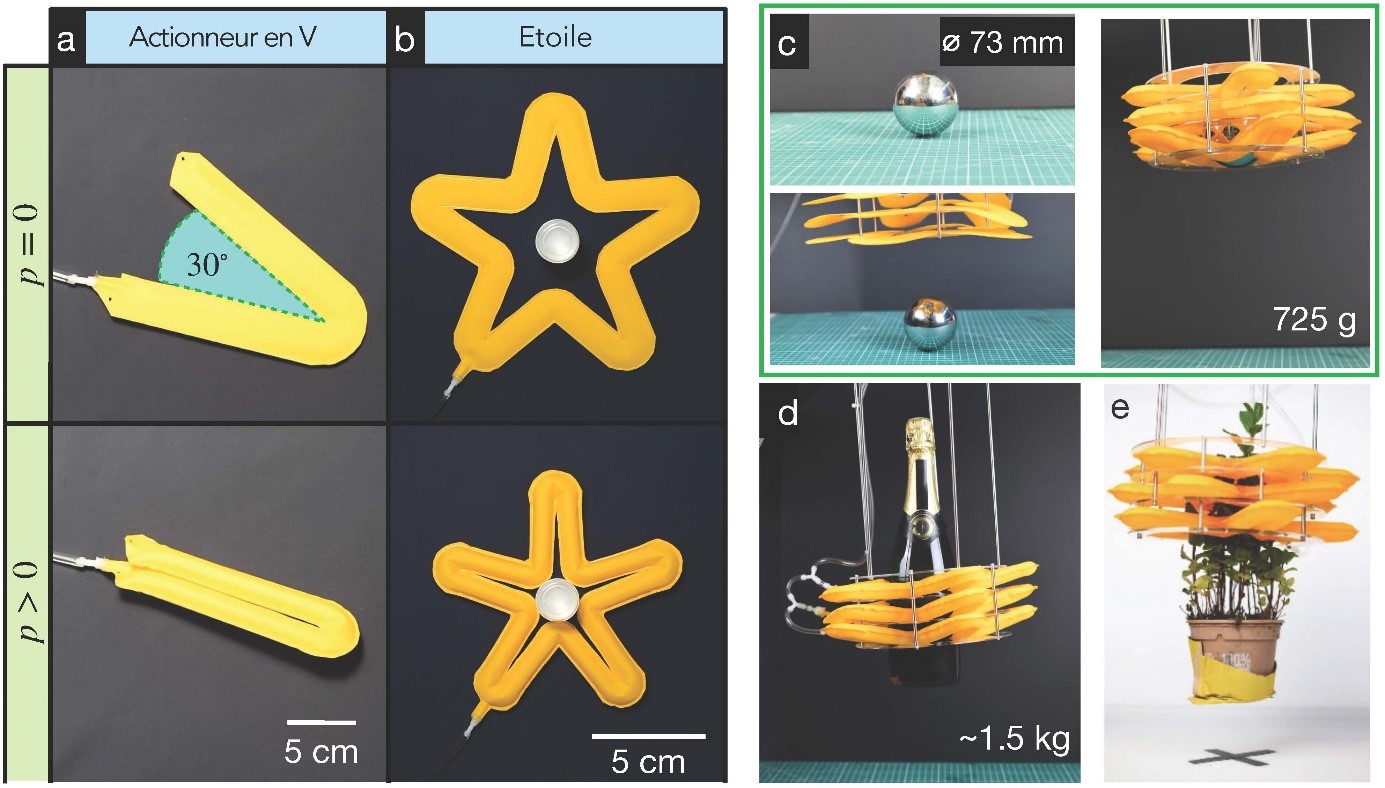
B : Le préhenseur en forme d'étoile à cinq branches, qui comporte dix actionneurs en V, se contracte radialement sur l'objet central.
C-E : Un empilement de trois étoiles permet de manipuler des objets lourds et volumineux (une boule de pétanque, une bouteille de champagne, une plante).
© IUSTI
Références
Fabric-based star soft robotic gripper
Ignacio Andrade-Silva, Joel Marthelot
Advanced Intelligent Systems, First published: 28 April 2023
https://doi.org/10.1002/aisy.202200435
Article consultable sur la base d’archives ouvertes Arxiv